
研究概要
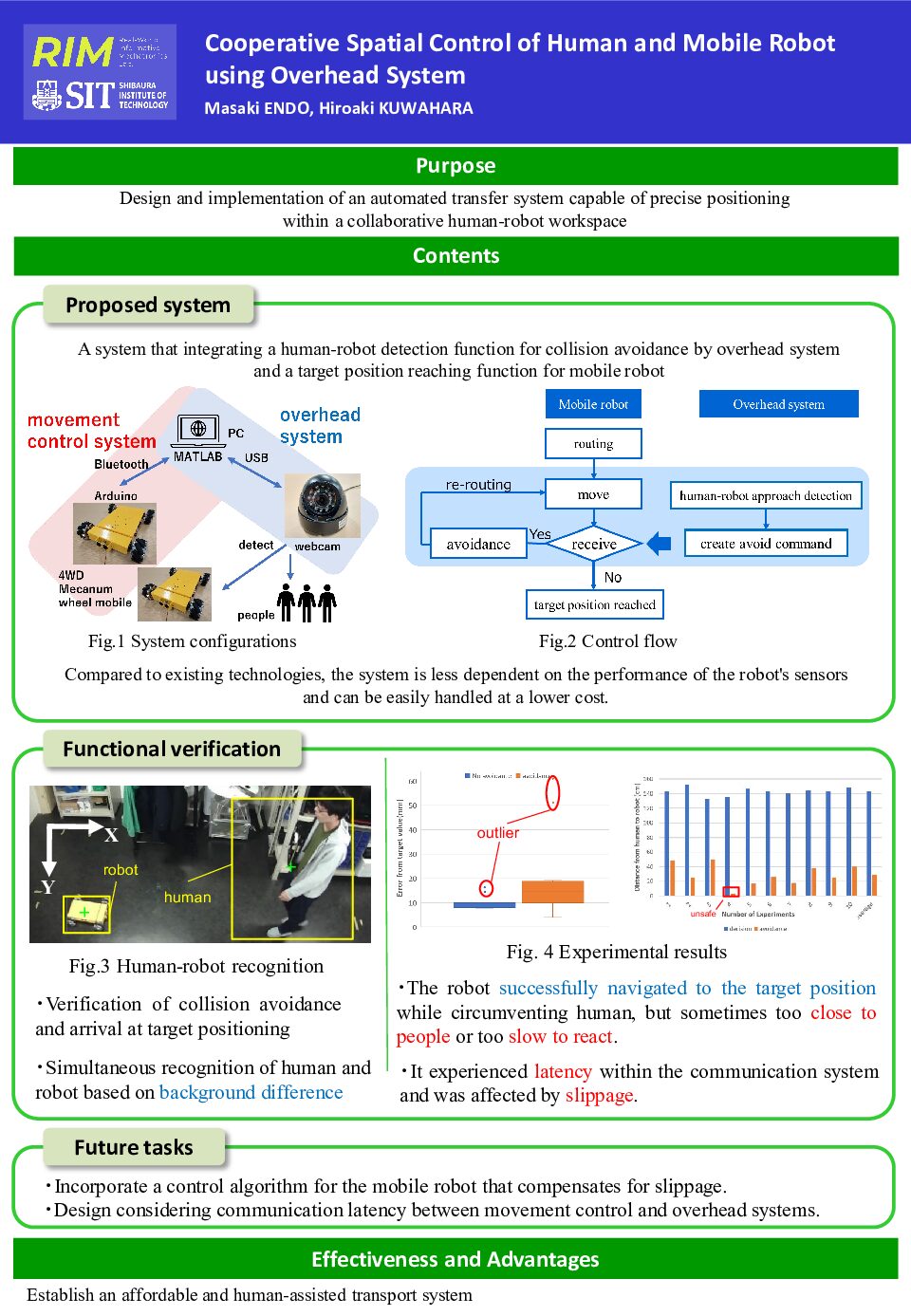
無人搬送車(Automatic Guided Vehicles)は、工場で人間と協力して活動的な役割を果たすことが期待されており、人間と同じ空間で協調作業するための機能をより多く備えるようになった。しかし、これらの機能を増やすごとにAGV単体のコストが増加する。そこで、本研究では、俯瞰システムを使用して、AGVが人間と同じ作業空間内で移動し、目標位置に輸送するシステムを提案した。
関連論文:M. Endo, H. Kuwahara, “Cooperative spatial control of human and mobile robot using overhead system,” Proc. of the 10th IEEJ International Workshop on Sensing, Actuation, Motion Control, and Optimization (SAMCON2024), Kyoto, Japan, (2024)