
研究概要
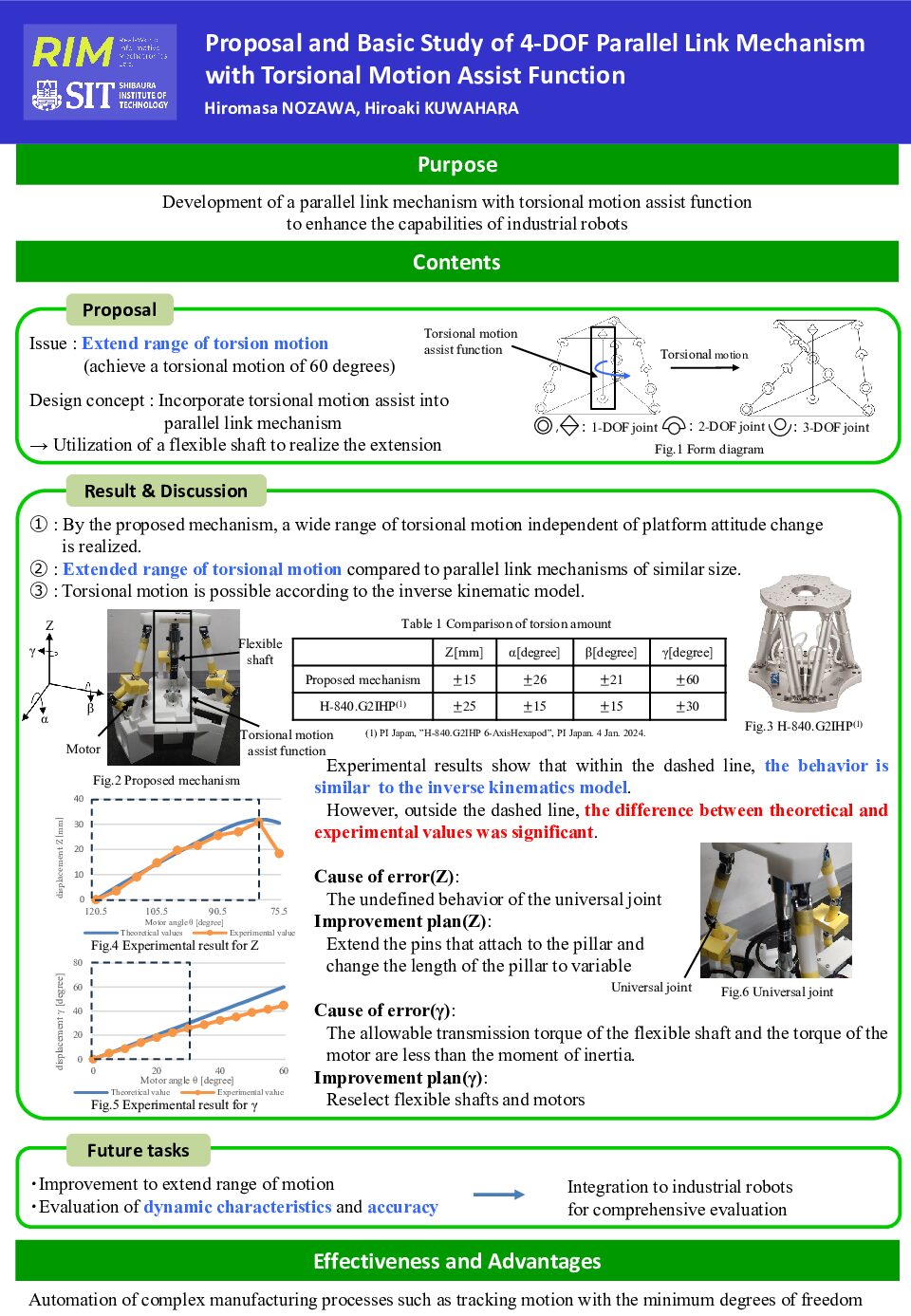
広い作業空間と精密な位置決めを達成するために、シリアルリンクロボットに後付けするパラレルリンク機構の開発を進めている。従来のパラレルリンク機構では、すべてのリンクを同時に制御する必要があり、作業が複雑になる。そこで、ねじり運動の補助機能を強化し、パラレルリンク機構だけで姿勢制御を容易にする新しい機構を開発した。これにより、シリアルリンクロボットの運動範囲をカバーすることで、ハイブリッドメカニズムの姿勢制御が簡素化される。必要な自由度はGruebler方程式に基づいて設計した。提案するパラレルリンク機構の実現可能性を、逆運動学の計算と実験結果を比較することによって確認した。
関連論文:H. Nozawa, H. Kuwahara, “Proposal and basic study of 4-DOF parallel link mechanism with torsional motion assist function,” Proc. of the 10th IEEJ International Workshop on Sensing, Actuation, Motion Control, and Optimization (SAMCON2024), Kyoto, Japan, (2024).