
研究概要
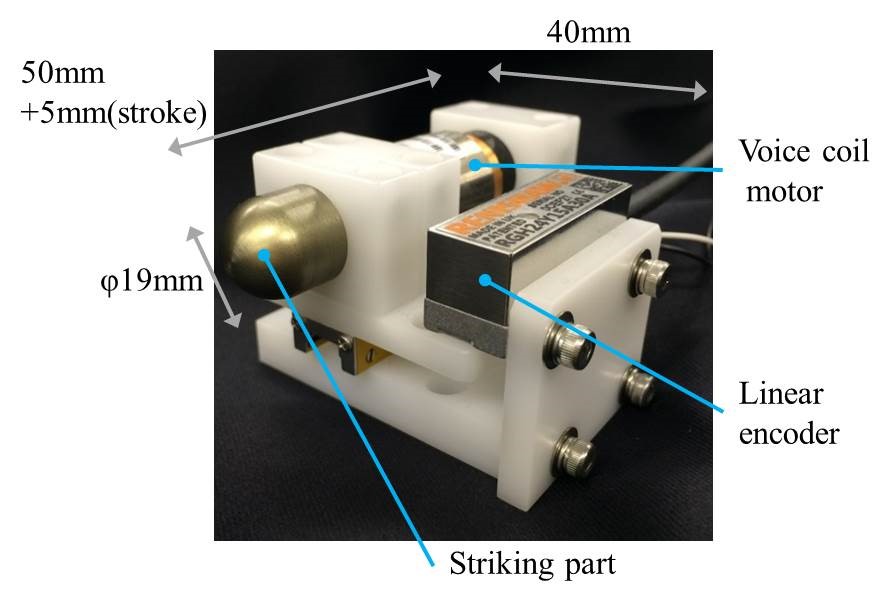
発電機の非破壊検査のため、ロータとステータの隙間を走行するロボットを開発した。ロボットは隙間に這うために十分に薄くする必要があるため、検査装置もコンパクトである必要がある。打撃はステータのくさびの緩みを検出する方法の一つであるが、この方法では、対象物を打撃して発生するエコー振動が解析されるため、装置には打撃機能と感知機能の両方が要求される。基本的に、ハンマーやマイクなどの2つのデバイスがこれらの機能を実現するために利用される。本研究では、力制御技術を備えた打撃装置とステータの楔緩みを検出する検査方法が提案している。打撃装置は打撃力を制御するだけでなく、環境反力を感知することもできるため、コンパクトになることが期待できる。さらに、打撃装置の利得特性を解析して内部ステータスロットモデルパラメータを推定し、モデルパラメータに基づいてステータの楔の緩みの量を推定する方法を開発し、実験により妥当性を実証した。
関連論文:桑原 央明, 溝口 貴弘, 下野 誠通, 大西 公平, “発電機点検の合理化に向けた力センサレス打振検査デバイスの開発,” 精密工学会誌, vol. 86, no.1, 2020, pp. 120-125, doi: 10.2493/jjspe.86.120.【査読付原著論文】