
研究概要
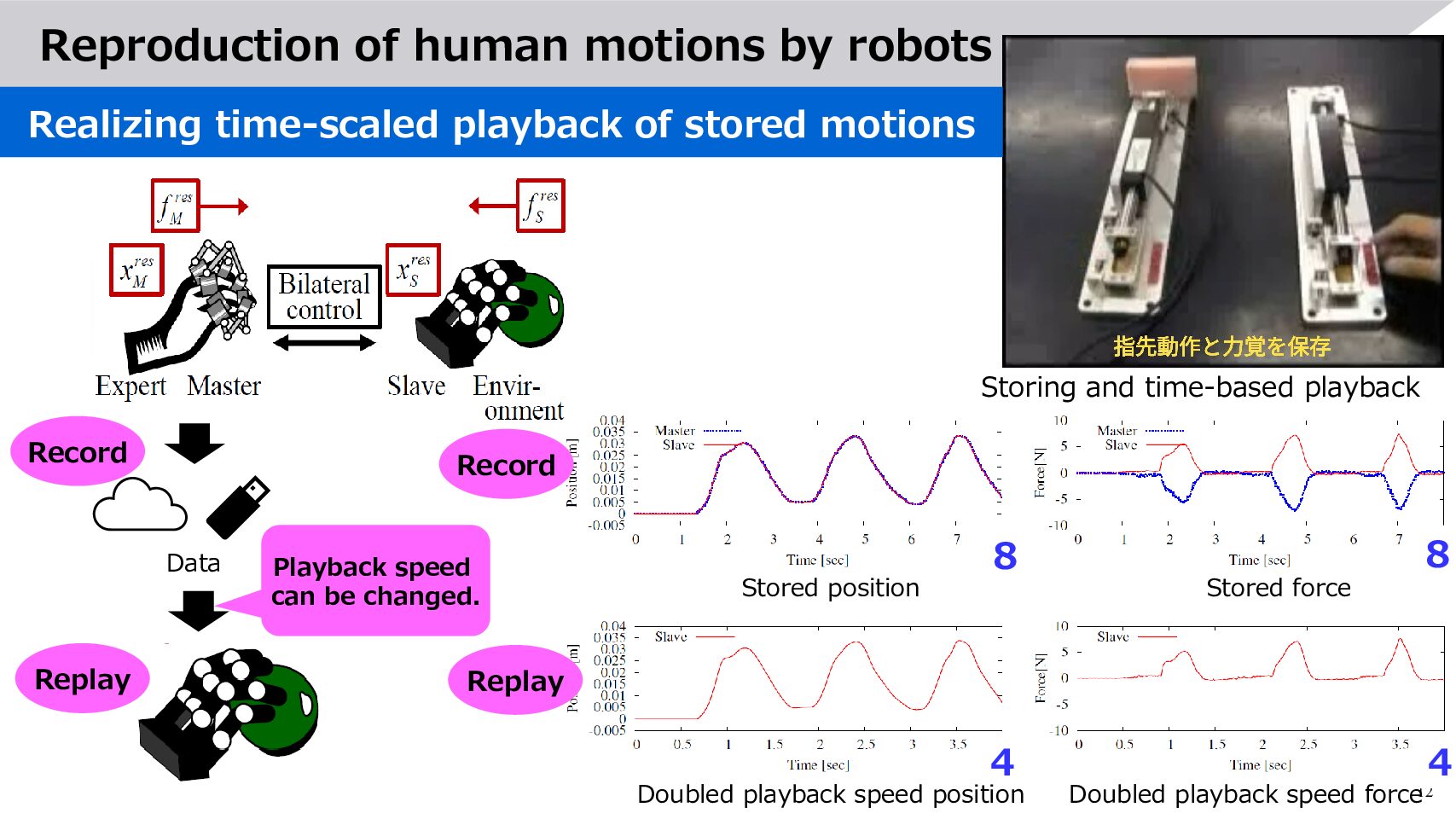
技能の保存と伝承の問題解決にむけ、人間の複雑で器用な動きを保存し再構築できるロボット技術を開発している。遠隔操作ロボットを用いて人間の動きを力覚情報として保存する。保存された動作は、空間的パターン(軌跡)と時間的パターン(時間サイクル)として再構築できる。例えば、システムの再生速度を任意に変更できる場合、作業効率が向上する。時間スケーリングは、動作の時間的パターンの拡大および縮小と定義し、提案した再生システムにより、空間的パターンが変わらずに時間的パターンを任意に変更できる制御方法を提案している。
関連論文:H. Kuwahara, K. Ohnishi, N. Tsunashima, S. Katsura, “Design method for motion reproduction system including time scaling based on robot dynamics”, Proc. of IEEE International Conference on Industrial Technology, (ICIT2010), Vina del Mar, Chile, (2010)