
研究概要
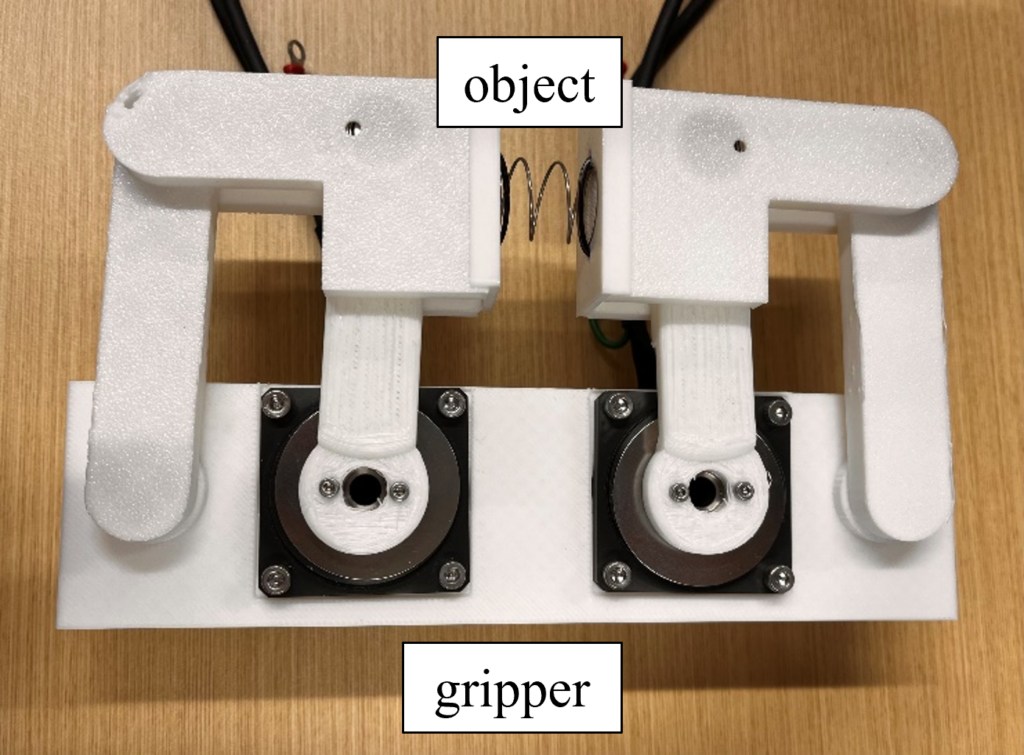
力センサレスでの把持力制御と、把持した物体の質量・剛性・粘性を推定するアクティブセンシングを両立するグリッパ制御手法を構築した。力制御と反力推定オブザーバを組み合わせることで、加振制御と振動応答の解析を実現し、把持中に物体の内部状態をリアルタイムに評価できるようにした。静的・動的実験の結果から、高い推定精度を確認しており、非破壊検査や品質管理への応用が期待される。
関連論文:横山稜, 桑原央明, “力制御グリッパによる把持物体情報のアクティブセンシング”, 令和7年電気学会全国大会予稿集、pp.219-220, 2025.