
研究概要
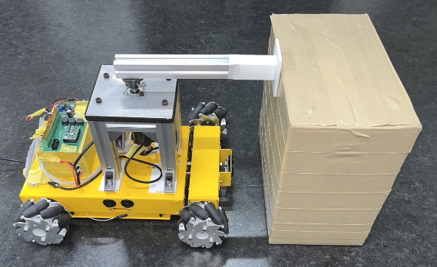
全方向移動マニピュレータによる自律的な押し動作制御手法を提案した。本手法では、未知物体に対する接触力を推定し、その情報をもとに仮想的な姿勢角を導出することで、ロボットとマニピュレータの押付力を最適化する。さらに、駆動力分配と外乱オブザーバを組み合わせることで、未知環境においても安定した押し動作の実現を目指す。
関連論文:橋本勇大, 桑原央明, “全方向移動マニピュレータによる物体との仮想姿勢角推定と自律押し動作 ”, 令和7年電気学会全国大会予稿集、pp. 235-236, 2025.