
研究概要
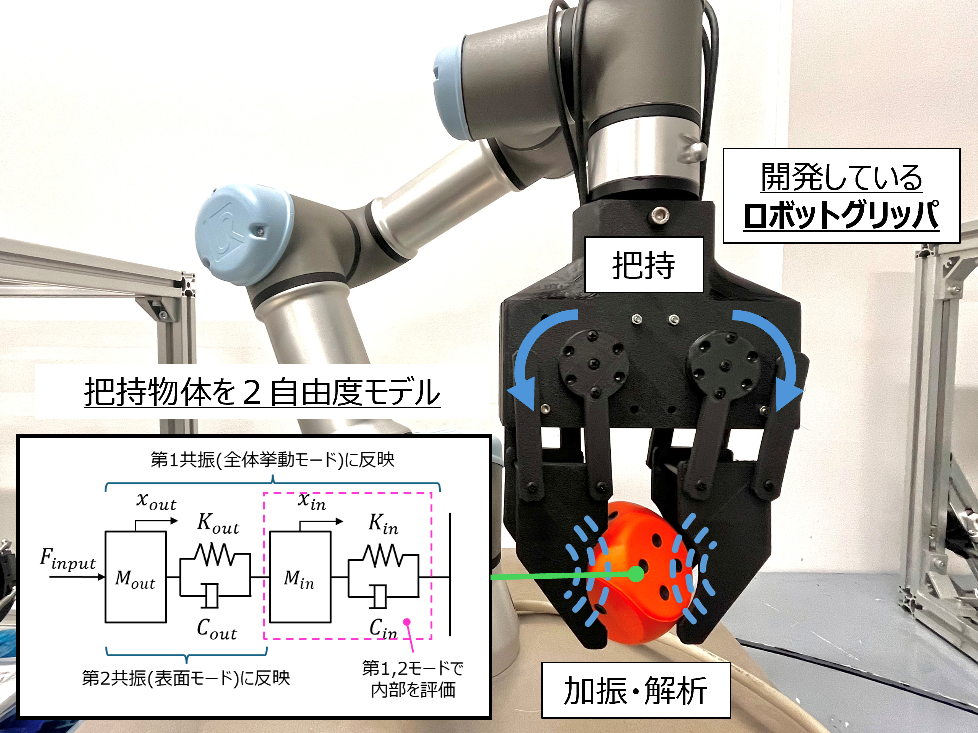
本研究は、物体を壊すことなく、その内部の状態を知ることができる賢いロボットハンドの実現を目指している。特別な力センサは使わず、モータの動きや電流などの情報から加わっている力を推定し、適切な強さでつかみながら小さな振動を与えることで、物体の中の状態を調べる方法を提案した。また、物体を「表面」と「内部」の二つの要素に分けて考えることで、例えばメロンの表層(硬い)と果肉(柔らかい)のように、それぞれの性質を分けて推定できる点が特徴である。検証実験では高い推定精度を確認しており、農産物の品質確認、インフラ部材の非破壊検査、医療分野での組織評価などへの応用も進める。
特許:桑原央明、横山稜、特願2025-135922、「推定装置、推定システム、および推定方法」
関連論文:横山稜、桑原央明、「力制御グリッパの振動応答解析による物体特性の非破壊推定方法」、2025年度電気学会産業応用部門大会予稿集、pp. II-213 – 218