研究概要|RESEARCH OVERVIEW
当研究室は、ロボットと実世界(人・自然・モノ)との
相互作用から生じる力や状態を推定・予測し、
運動や機能の制御へ統合する基盤技術を発展させています。
この基盤を「相互作用力の知能化(Force & Interaction Intelligence)」と位置づけ、主に以下の領域で研究を展開しています。
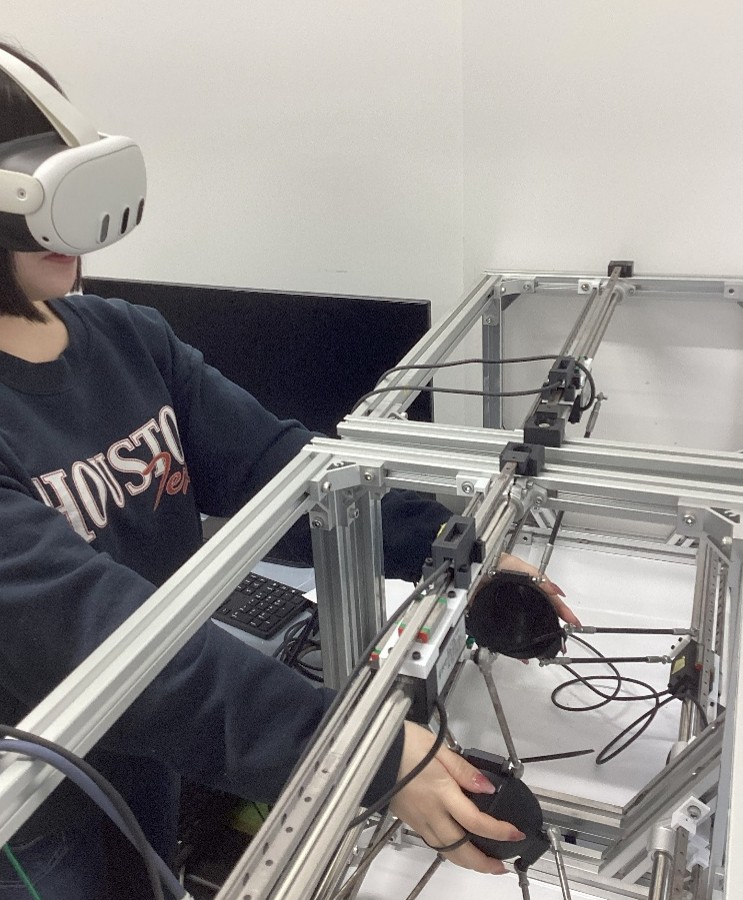
(1) 遠隔操作・人間支援ロボティクス
|Teleoperation & Human Assistance Robotics
力覚・振動などの相互作用情報を活用する遠隔操作・ハプティクス技術を基盤とし、
遠隔手術、精密加工、水中・宇宙環境作業などへ展開可能な力覚伝達やスキルトランスファを実現し、人の身体能力を支援・拡張する。
(2) 高機動・環境適応モビリティ
|Adaptive & High-Mobility Systems
ロボットと環境との接触力の推定・制御に基づき、自律移動および屋内外自動運転を実現し、パーソナルモビリティや極限環境においても不確実環境下で安定した移動と高い環境適応性を達成する。
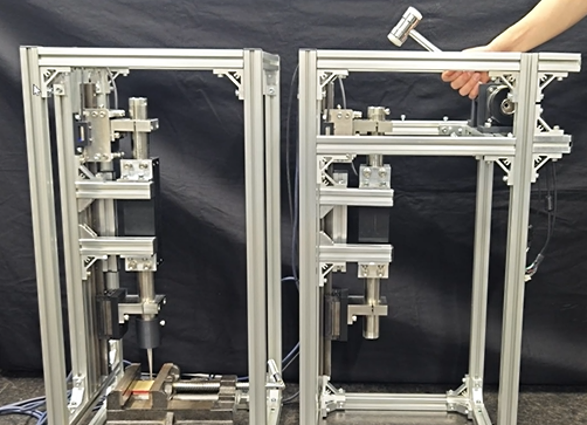
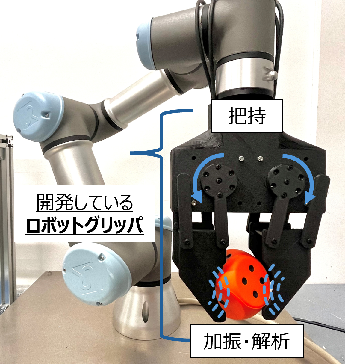
(3) AI×制御で知能化する製造・インフラ保守
|AI-Driven Intelligent Manufacturing & Infrastructure
力制御と相互作用解析を核とし、AI×モデルベース制御により、人間の「つくる・検査する」技能を数理化・自動化することで、製造装置の性能高度化とインフラ点検・保守の自律化を実現する。
詳細テーマ|DETAILED THEME
PJテーマ|PJ THEME